Praveen
Praveen
Home
Experience
Accomplishments
Projects
Publications
Posts
Light
Dark
Automatic
1
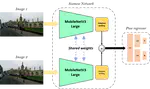
RelMobNet: End-to-end relative camera pose estimation using a robust two-stage training
Relative camera pose estimation plays a pivotal role in dealing with 3D reconstruction and visual localization. To address this, we propose a Siamese network based on MobileNetV3-Large for an end-to-end relative camera pose regression independent of camera parameters.
Praveen Kumar Rajendran
,
Sumit Mishra
,
Luiz Felipe Vecchietti
,
Dongsoo Har
PDF
Cite
Code
Slides
Sensing accident-prone features in urban scenes for proactive driving and accident prevention
In urban cities, visual information along and on roadways is likely to distract drivers and leads to missing traffic signs and other accident-prone features. As a solution to avoid accidents due to missing these visual cues, this paper proposes a visual notification of accident-prone features to drivers, based on real-time images obtained via dashcam.
Sumit Mishra
,
Praveen Kumar Rajendran
,
Luiz Felipe Vecchietti
,
Dongsoo Har
PDF
Cite
Code
Slides
Socially acceptable route planning and trajectory behavior analysis of personal mobility device for mobility management with improved sensing
In urban cities, with increasing acceptability of shared spaces used by pedestrians and personal mobility devices (PMDs), there is need for pragmatic socially ac-ceptable path planning and navigation management policies. Hence, we propose a socially acceptable global route planner and assess the legibility of the resulting global route.
Sumit Mishra
,
Praveen Kumar Rajendran
,
Dongsoo Har
PDF
Cite
Code
Slides
Cite
×